
当ブログではアフィリエイトによる広告を使用しています。
キーエンスPLCの歩進制御(順序制御)について解説していきます。
概要
歩進制御(順序制御とも言う)とは、ラダープログラムの記述方法の一つで簡単に言うと制御対象の機器動作の順番に沿って上からラダープログラムを記述していく方法。ラダープログラムは人によって記述方法がそれぞれなため、初めての方は非常に戸惑うかと思われます。筆者もまだまだ未熟ですが、参考程度に見ていただければと😊😊
歩進制御(順序制御)とは
・歩進制御
機器動作の順番に沿って、上から下に順番にラダープログラムを記述していく方法。順番に記述していくことで、他の人から見た時でも理解がしやすく、実動作時のデバック時にもデバックしやすいというメリットがある
ラダープログラム例
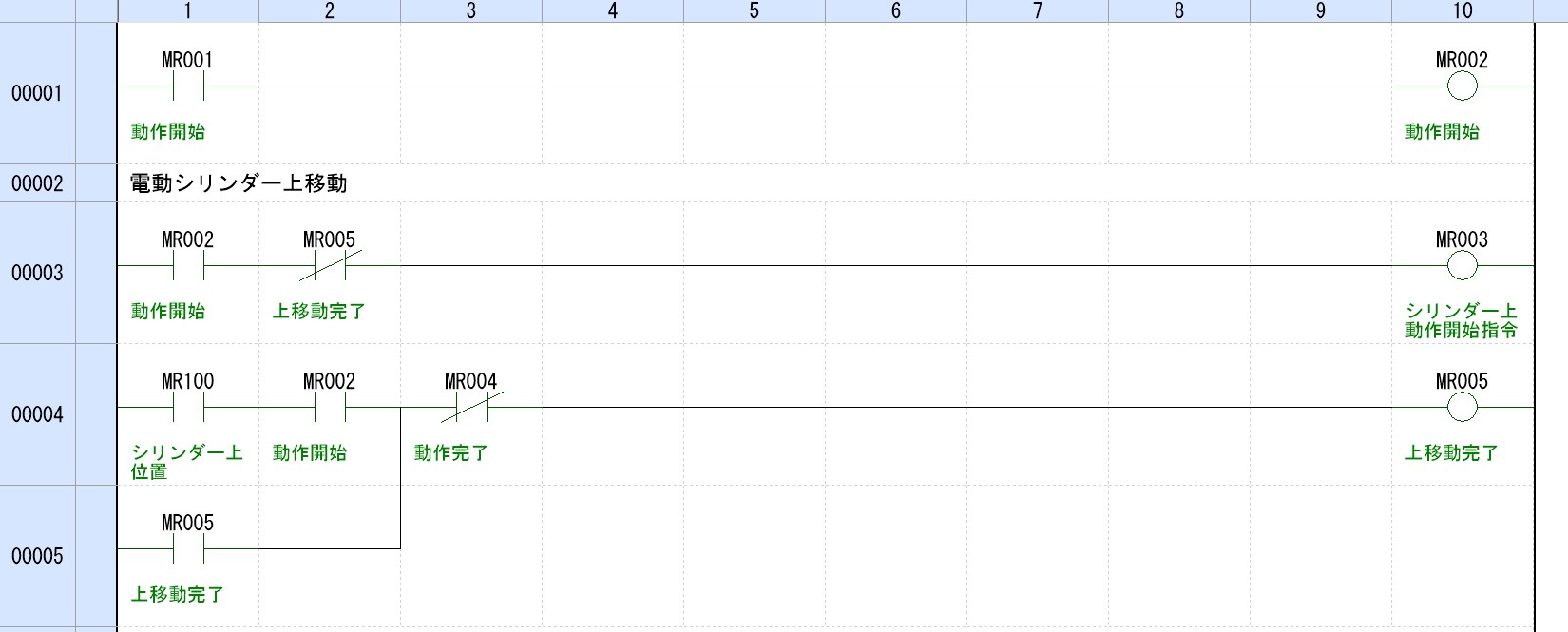
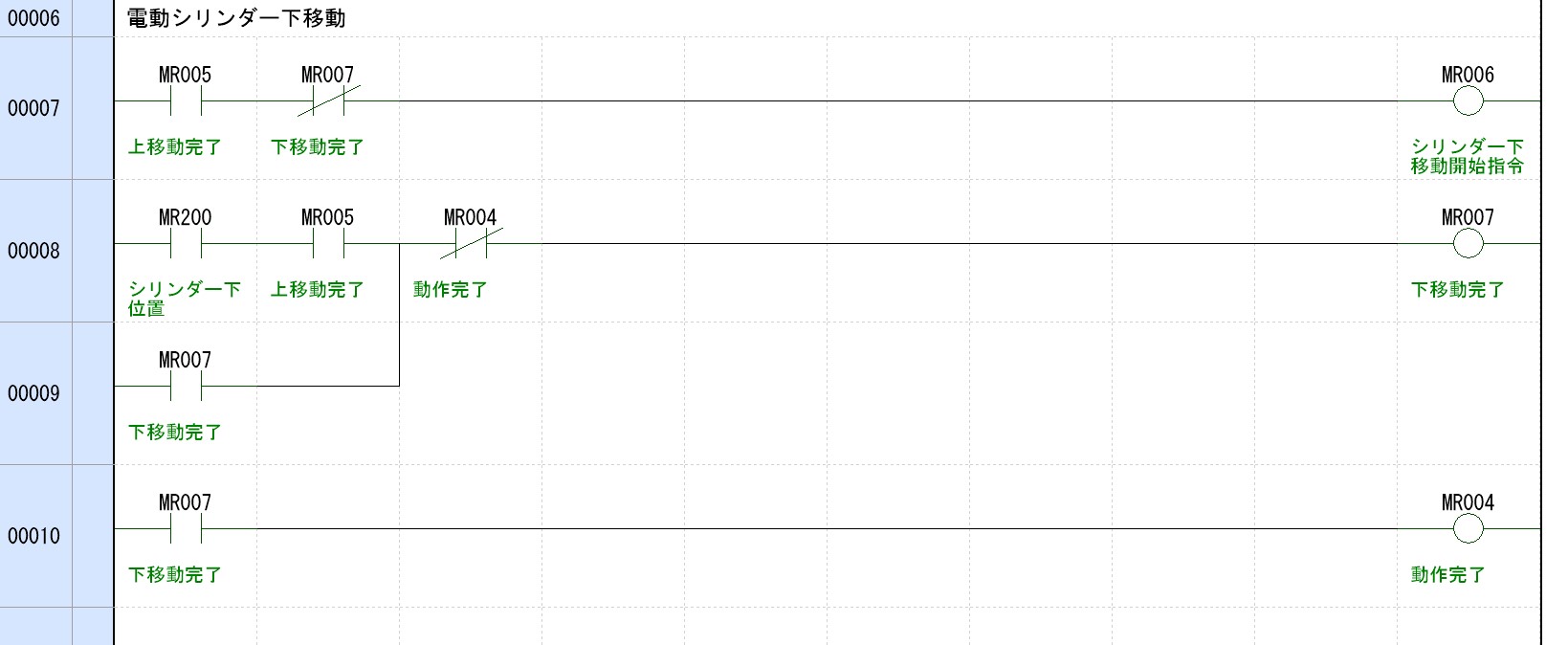
実際のラダープログラムを例にして解説していきます。前提となる機器動作として、電動シリンダーを上に上げる動作、下げる動作がある機器を順番に制御していきます。
ポイント解説
ラダーを解説すると以下のようになります。
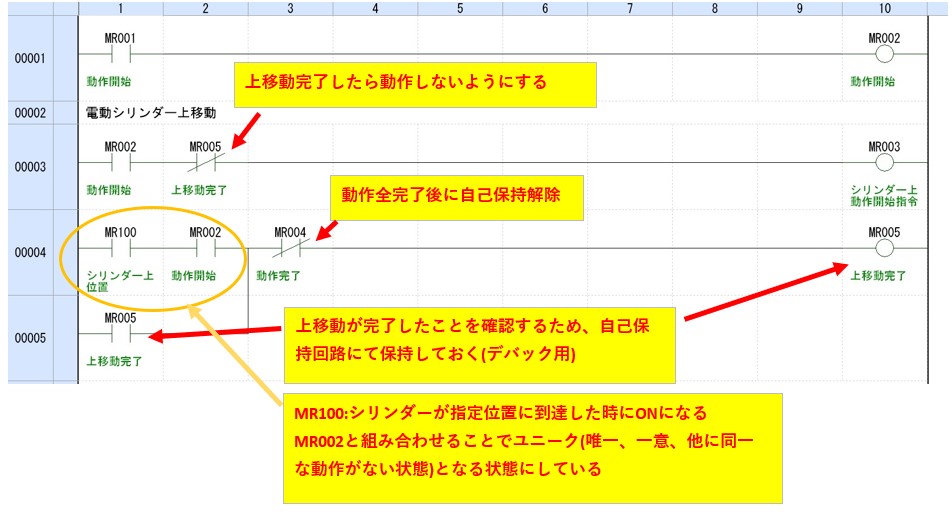
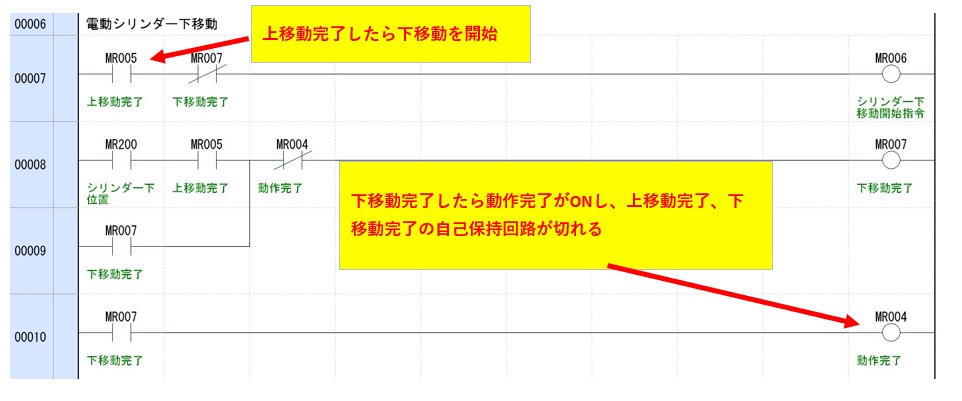
ポイントとしては、
・シリンダー動作の指令をユニーク(唯一)動作とするため、動作完了後に動作指令が切れること(3行目、7行目)
・動作完了の信号をユニーク動作となる条件より作成すること(4行目、8行目)
・それぞれの動作毎(上移動動作、下移動動作)の完了毎に自己保持回路を設定しておくことで、トラブル時等にどこまで動作しているのかが分かるようになる(4,5行目、8,9行目)
・自己保持回路は最後(動作完了後等)には切れるようにしておくこと(4行目、8行目)
以上、人によってやり方は様々かと思いますのであくまでも参考です😊😊😊
キーエンスPLCのまとめサイト
キーエンスPLCのまとめサイトはこちら。
このサイト全体のまとめサイトはこちら。
おススメ記事
・在荷センサとは
・電動シリンダとは
・フェルール端子とは
・ねじの基本
・アースの基本(PE,FG)
・DINレールとは
・端子台とは
・コモン端子台とは

![]()
![]()
![]()
![]()
コメント