
当ブログではアフィリエイトによる広告を使用しています。
概要
工場見学に行ったことのある方は分かるかと思いますが、自動化されている機械で最初に目につくのはロボットなどの動きがあるもの😊今回取り上げるセンサは動くことはないので一見、地味ですが実はとても重要で、自動化にはかかせないものなんです😊😊
センサといっても、様々な種類、用途があり日々開発されているのですが、今回は物の有/無を判別する在荷センサをご紹介😄😄この記事を見た後で工場見学に行った方は、自動化された機械の見方がちょっとかわるかも!!
在荷センサとは
・在荷の定義
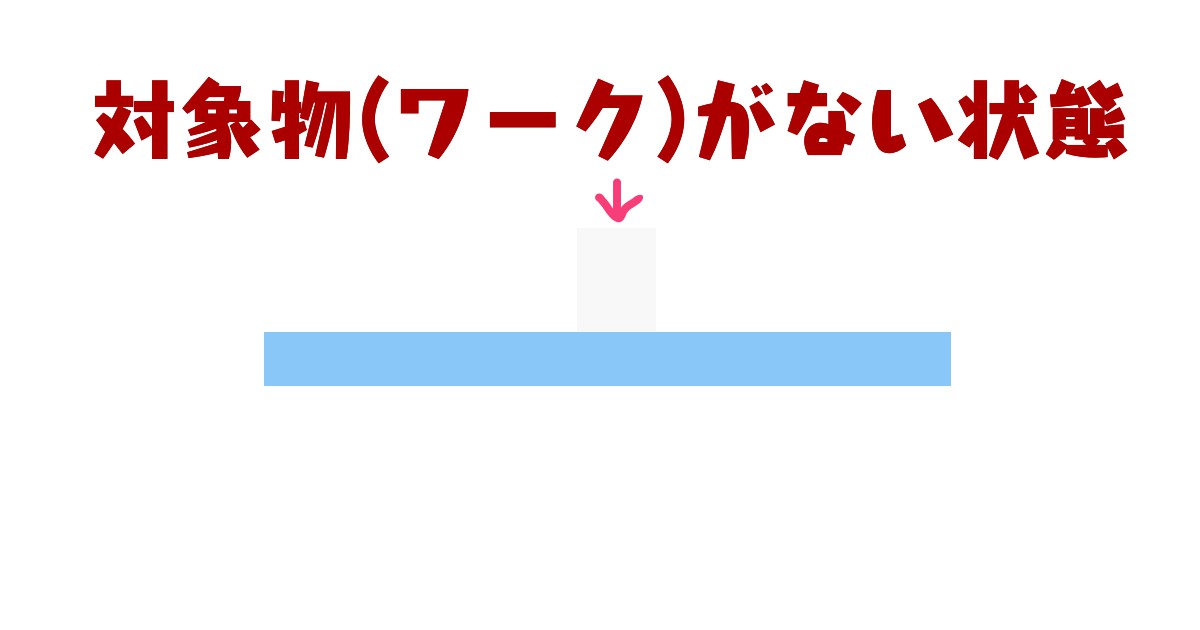
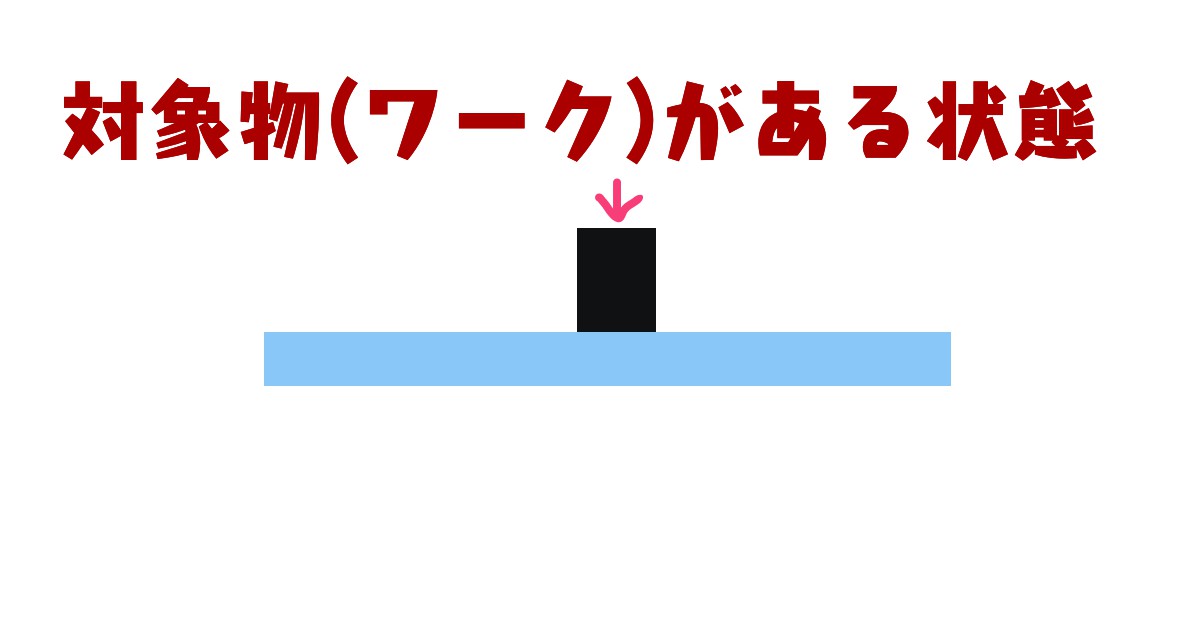
ある決まった位置に対象物がある場合を 在荷有
ない場合を 在荷無
とします。
・対象物の定義
在荷有・在荷無の検出対象となる物を ワーク とします。
一般的に 在荷センサ と呼ばれているものは
ある決まった場所に ワークが 在荷有・在荷無 のどちからであるかを判別し、結果を信号として出力するという機能を持ったセンサとなります。
使用方法例として、ロボットがワークを取りに行く動作をする場合、
ワークが在荷有の場合:ロボットはワークを取りに行く
ワークが在荷無の場合:ロボットはワークを取りに行かない
といった動作を変更することに在荷センサの信号を使用します。
検出方法いろいろ
ワークの有無を判別する方法には様々あり、光で検出、電流の変化を読み取って検出、物理的に接触することにより検出、超音波による検出、近年どんどん進化してきている方法として画像検出などもあります。近い将来、AI(人工知能)を搭載することでこれまで難しかった検出も可能になってくるのではと筆者は予測しています。
光で検出
・光電センサ
光を使用してワークの有無を判別するセンサです。
光を出す部分(投光部)、光を受ける部分(受光部)があり、投光部から出た光が受光部に届いているかを検出し、結果を判定する。
・エンジニア目線での概要
ワーク在荷用のセンサとして最も一般的なセンサになります。在荷センサを検討する際、まずは光電センサを検討します。幅広い用途に対応しており、信頼度も非常に高く使いやすいセンサです。
・特徴
検出できるワークの種類が豊富
ワークのしゃ光量によって検出するので、金属、プラスチック、ガラス、液体などほとんどのワーク材質を検出可能です。
検出可能距離が長い
数メートル先のワーク検出も可能なほど、検出可能距離が長いです。
非接触検出、長寿命
ワークに接触させる必要がないので、ワークを傷つけることがありません。また同様にセンサ自体も傷つかず、メンテナンスが不要、長寿命です。
・主な種類
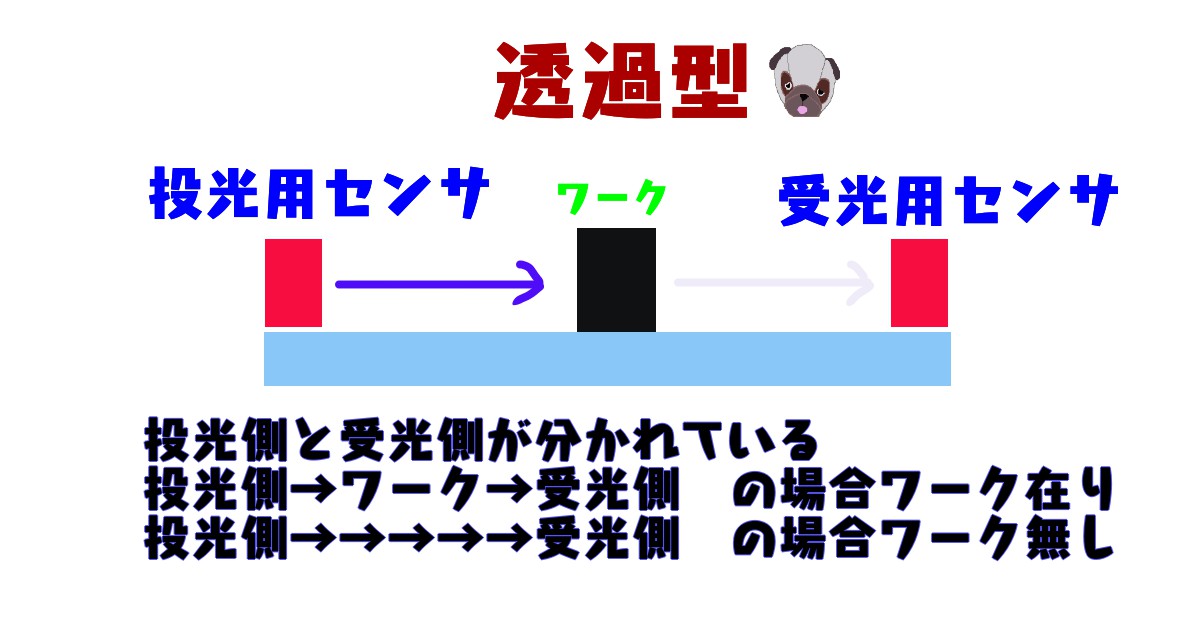
・透過型
投光用センサと受光用センサをセットで使用します。動作の安定性が高い、検出距離が長い、ワークの形状、色、傾きなどの影響を受けにくい、といった特徴があります。
設置場所に問題がない場合、第一候補にあがるセンサです。
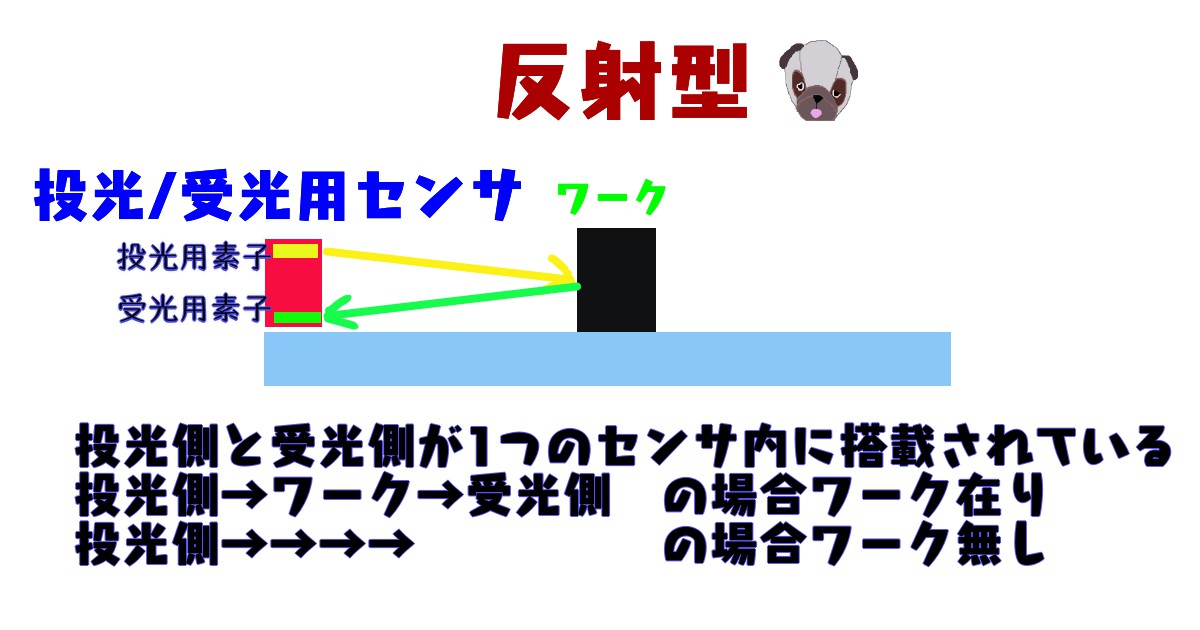
・反射型
1つのセンサ内に投光用素子、受光用素子が内蔵されています。ワークから反射してくる光を受光することによりワーム有無を判別しています。透過型と比較して検出距離は短い(センサとの距離を近づけすぎても判別不可な場合もあり)、ワークの形状、色、傾きなどの影響を受けやすい、といった特徴があります。設置場所が限られていて透過型では難しいといった場合に候補にあがるセンサです。ただし、ワーク自体の影響(形状、色、傾きなど)を受けやすいため、事前に反応具合を確認してから使用するのが無難です。
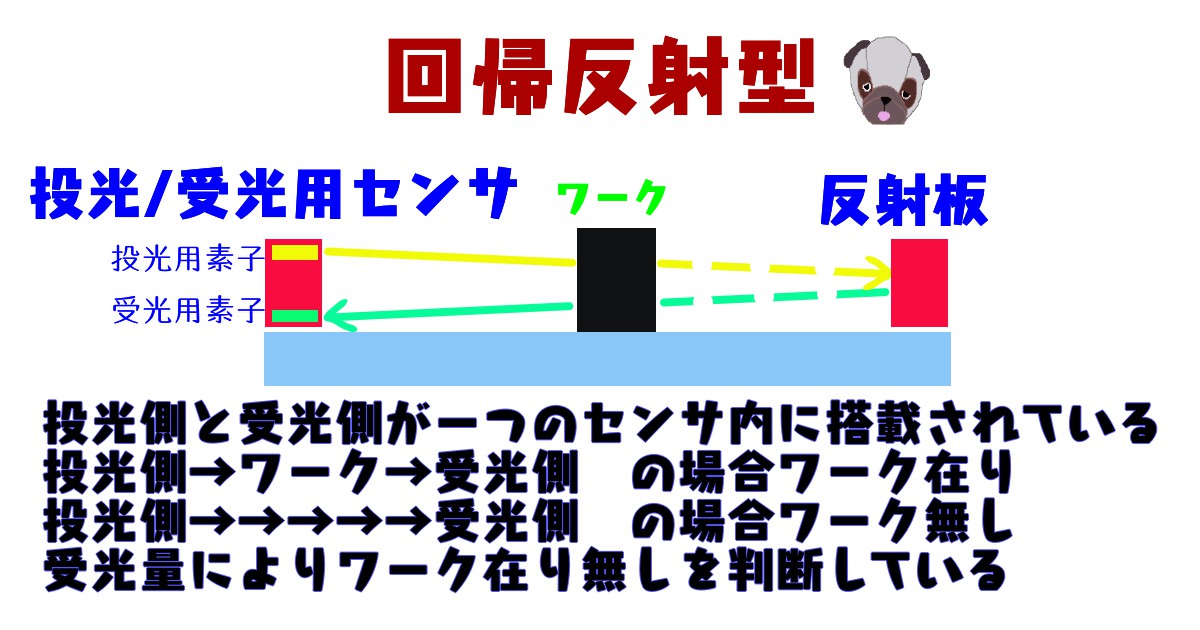
・回帰反射型
反射型と同じく、1つのセンサ内に投光用素子、受光用素子が内蔵されています。反射型との違いは反射板の設置が必要なことです。これにより例えばワークがガラスなどの透明体の場合、
投光素子→ワーク→反射板→ワーク→受光素子 というように光がワークを2回通ることで受光量に違いが出やすくなり、ワーク有無の判別精度が高くなります。
透明体、ワークの形状などにより反射型では安定しない場合などに、検討してみるとよいかと思います。
・光で検出するその他のセンサ
光で検出するセンサは他にもいろいろな種類があります。
・ファイバーセンサ
光ファイバーを使用することで狭い場所、ワークサイズが小さい場合などに対応しているセンサです。こちらもよく使用候補にあがるセンサですが、ワークの形状、検出距離の影響を受けやすいため設置時には事前確認が必要です。
・レーザーセンサ
投光にレーザーを使用するセンサです。レーザーを使用することで光軸が安定するため、長距離、距離の測定も可能、ワークの影響(形状、色、傾き)を受けない といった特徴がありとても高性能なセンサです。ただし、お値段がお高いです。
・カラーセンサ
色の判別が可能なセンサです。受光側の周波数を細かく判別する素子を使用することなどで色の判別を可能としています。筆者は使用したことがないですが、レーザーセンサ、カラーセンサ、画像データなどを組み合わせ、さらにAIを使用することでこれまで不可能だった検出が可能になるかも、ということで注目しています。😄😄
電流の変化で検出
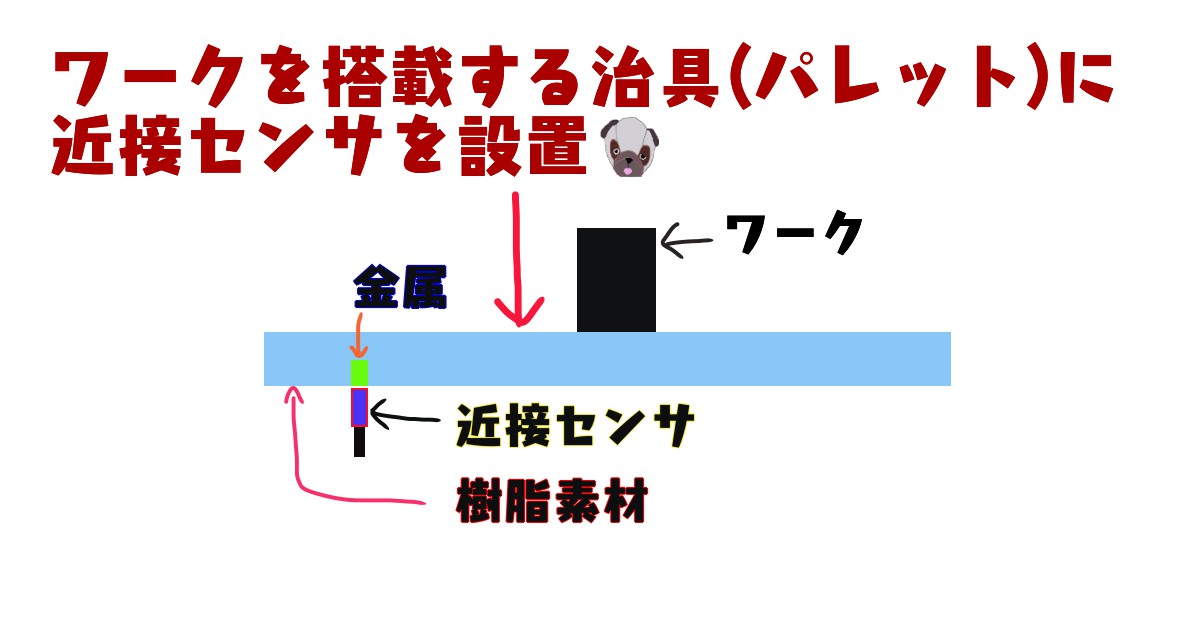
・近接センサ
センサ内に流れている電流の変化を読み取ってワークの有無を判別するセンサです。
金属の特性を利用しているセンサで金属製ワークの検出専用となる。センサと金属の間に樹脂などの金属以外の物体があってもワーク有無を判別することが可能となっている。ワーク(自動処理対象物の意味)を直接判別するのに使用するのではなく、ワークを複数置いておく治具(パレット)の有無を検出する場合などに使用します。
・エンジニア目線での概要
光電センサと同様によく使用されるセンサです。金属にしか使用できない、検出範囲が狭いため使用する場合、検出物側の設計(検出対象物が樹脂などの場合、検出用金属の設置、センサの設置場所の設計など)が必要となります。光電センサよりも価格が安いので大量に使用する場合などにも候補に挙がりますが、設置時の設計、検出距離が短いなどの問題をクリアする必要があります。センサ自体が頑丈にできているため、油が流れているなどの悪環境下などでも使用することが多いです。
・特徴
金属のみを検出
金属の特性を利用した検出方法のため、樹脂に覆われた金属などの検出が可能です。
耐環境性が高い
センサ自体の構造が頑丈に出来ているため、油、水などがかかる悪環境下でも使用可能です。
非接触検出、長寿命
ワークに接触させる必要がないので、ワークを傷つけることがありません。また同様にセンサ自体も頑丈に出来ており、メンテナンスが不要、長寿命です。
専用の設計が必要
金属しか検出しないため検出対象物の近くに金属がないことなど、センサの設置場所、検出対象物側の設計が必要となります。
金属の種類によりセンサが異なる
磁性体(磁石にくっつくもの),非磁性体(磁石にくっつかないもの)、アルミなど金属の材質により使用できる近接センサの種類、検出距離が異なります。

接触で検出
・接触式変位センサ
測定するワークに直接センサを接触させて変化量を読み取るセンサです。
ワークに直接接触させるので、非接触式と比較して精度が高い、ワークが固くないと測定できない、応答時間が遅いという特徴がある。これまで手動の測定機器(ノギス、マイクロメーターなど)で測定していた箇所を精度が同様で自動化したい場合などに使用します。
・エンジニア目線での概要
ワークの在荷というよりは高さを測定するなど検査目的で使用することが多いです。精度が非常に高いのですが、ワークに接触させるという性格上、センサ自体を動かして測定、ワーク自体を動かして測定が必要なため、シリンダ(エア式、電気式)などを使用し動作させる機構が必要のため設計が必要であったり、測定時間がかかるといった問題があります。
・特徴
ワークに接触させて計測
ワーク自体が固くて変形しないものである必要があります。
測定精度が高い
レーザー式と比較して、精度が高いです(例:レーザー式±0.1mm、接触式±0.01mm(機器により精度は異なります))。
専用の設計が必要
ワークに接触させる機構が必要のため、専用の設計が必要となります。
超音波で検出
・超音波センサ
ワークに超音波を発信して、ワークから反射してくる超音波を受信し、その時間を測定することでワークまでの距離を測定するセンサです。
ガラス、液体などの透明体、およびワーク形状があみあみ(メッシュ)だったりと複雑な形状でも検出が可能です。測定精度は低いです。
・エンジニア目線での概要
使用したことがないです😫😫😫
・特徴
透明体の検出が可能
ガラス、液面などの透明体でも超音波が反射してくるワークであれば検出が可能です。
複雑な形状の検出が可能
あみあみ(メッシュ)、ばねなどの形状でも検出が可能です。
ホコリ、ミスト雰囲気などの悪環境下でも検出が可能
細かすぎるものには反応しないため、ホコリが多い環境でも検出が可能です。
画像で検出
・画像判別センサ
撮影した画像からワークの有無、違いを判別するセンサです。
画像を使用するので、複数のポイントの違いを判別したり、ワークの位置がずれても画像内に入っていれば検出可能です。
・エンジニア目線での概要
目視での検査に置き換えて使用することが多いです。ねじの有無、シール添付の有無などを検出できます。面で検出するため表面、裏面両方を検査するばあい、ワークを動かすなどが必要になります。レーザーセンサと組み合わせたセンサもあり、距離を検出できるなど新しい物がどんどん増えていますのでエンジニアの方々は要チェック😄😄😄
・特徴
複数ポイントの検出が可能
画像内の複数個所で、別々の検出が可能です。また検出対象自体が変わっても検出可能です。
ワークの位置がずれても検出可能
画像内のワークが認識可能であれば、位置がずれても検出可能です。
複雑形状でも検出可能
カメラ精度にもよりますが、複雑な形状(ギザギザだったり、楕円だったり)でも検出が可能です。
その他サイトのご紹介
おススメ記事
・電動シリンダとは
・フェルール端子とは
・ねじの基本
・アースの基本(PE,FG)
当サイトの全体はこちらからどうぞ
・当サイトのまとめサイトはこちら。
・キーエンスPLCまとめ。

![]()
![]()
![]()

![]()
コメント